
-
-
2022-03-14 為什么步進(jìn)電機(jī)通電后,,電機(jī)不運(yùn)行,?
為什么步進(jìn)電機(jī)通電后,電機(jī)不運(yùn)行,? ?有以下幾種原因會造成電機(jī)不轉(zhuǎn): 1,、 過載堵轉(zhuǎn)(此時電機(jī)有嘯叫聲) 2、電機(jī)是否處于脫機(jī)狀態(tài) 3,、控制系統(tǒng)是否有脈沖信號給步進(jìn)電機(jī)驅(qū)動器,,接線是否有問題
-
-
2022-03-12 步進(jìn)電機(jī)振動大,,噪聲也很大,什么原因,?
遇到這種情況是因?yàn)椴竭M(jìn)電機(jī)工作在振蕩區(qū),,解決辦法: 1、改變輸入信號頻率CP來避開振蕩區(qū),。 2,、采用細(xì)分驅(qū)動器,使步距角減少,,運(yùn)行平滑些,。
-

-
2022-03-12 如何控制步進(jìn)電機(jī)的方向,?漢德保電機(jī)為你解答
購買的漢德保步進(jìn)電機(jī),,如何控制步進(jìn)電機(jī)的方向?實(shí)現(xiàn)方向自由化,。 1,、可以改變控制系統(tǒng)的方向電平信號 2、可以調(diào)整電機(jī)的接線來改變方向,,具體做法如下:
-

-
2021-05-18 電機(jī)發(fā)熱的原因以及解決方法
電機(jī)發(fā)熱,,原因很多,一般伴隨著異常聲響,,聞到糊焦 味,。這時應(yīng)立即關(guān)閉電源、停止洗衣,。并仔細(xì)檢查故障原 因,切不可麻痹大意,。 電機(jī)會發(fā)熱的原因是由21種原因造成:
-
-
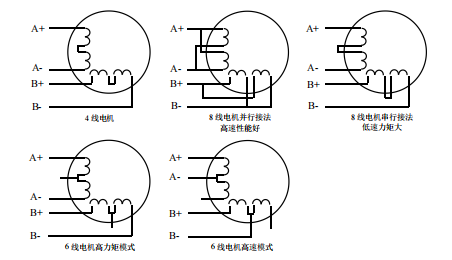
2021-05-17 二相電機(jī)四線、六線,、八線的區(qū)別
四相混合式電機(jī)也稱二相混合式電機(jī),只是四相電機(jī)的繞組引出線有多種接法,。多組線圈多個抽頭,是為了適應(yīng)不同工控條件而設(shè)計(jì)的,。由于步進(jìn)電機(jī)的線圈,,與轉(zhuǎn)速、轉(zhuǎn)矩有著密切的關(guān)系,。高速與低速工作的步進(jìn)電機(jī)參數(shù)有所不同,。通常,高速步進(jìn)電機(jī)的電感要求小一點(diǎn),,低速工作時要求大一點(diǎn)的電感量,。
-

-
2021-05-15 溫升對電機(jī)有什么影響
電機(jī)在多高的溫度下能夠正常工作?電機(jī)運(yùn)行能夠承受多高的溫度,?”這個問題是企業(yè)使用電動機(jī)所面臨的常見問題,。電動機(jī)的工作溫度考慮的主要是轉(zhuǎn)子上漆皮能承受的最高溫度,如果超過這一溫度,,漆皮容易被破壞,,而出現(xiàn)故障。如果電動機(jī)的允許最高工作溫度為150攝氏度,,而使用環(huán)境為30攝氏度,,那么允許的最高溫升只能是120k。
-

-
2021-05-13 步進(jìn)電機(jī)驅(qū)動器細(xì)分的優(yōu)點(diǎn)及作用
步進(jìn)電機(jī)驅(qū)動器細(xì)分的優(yōu)點(diǎn)及作用
-

-
2021-05-05 ethercat和modbus/RS485和canopen總線型驅(qū)動器的特點(diǎn)區(qū)別
ethercat和modbus/RS485和canopen總線型驅(qū)動器的特點(diǎn)區(qū)別
-

-
2021-04-26 怎么樣通過PLC脈沖頻率計(jì)算步進(jìn)電機(jī)轉(zhuǎn)速,?
步進(jìn)電機(jī)是將電脈沖信號轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進(jìn)電機(jī)件。在非超載的情況下,,電機(jī)的轉(zhuǎn)速,、停止的位置只取決于脈沖信號的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動器接收到一個脈沖信號,,它就驅(qū)動步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動一個固定的角度,,稱為“步距角”,它的旋轉(zhuǎn)是以固定的角度一步一步運(yùn)行的,??梢酝ㄟ^控制脈沖個數(shù)來控制角位移量,從而達(dá)到準(zhǔn)確定位的目的,;同時可以通過控制脈沖頻率來控制電機(jī)轉(zhuǎn)動的速度和加速度,,從而達(dá)到調(diào)速的目的。
-
-
2021-04-24 怎么樣避開步進(jìn)電機(jī)共振區(qū),?
電機(jī)振動是經(jīng)常遇到的問題,會影響電機(jī)的使用壽命,,可以通過機(jī)械和電磁方面解決,。但是低速振動是所有步進(jìn)電機(jī)都存在的正常現(xiàn)象,,是什么原因,? 離散的,逐步的運(yùn)動使步進(jìn)電機(jī)具有精確的定位能力,,這也導(dǎo)致某些不良的性能特征,,步進(jìn)電動機(jī)由于轉(zhuǎn)子的慣性而在每一步中自然會表現(xiàn)出較小的振動,這會導(dǎo)致電動機(jī)略微超調(diào)(或在某些情況下會下沖)步進(jìn)位置并振蕩,,直到以正確的步進(jìn)角“穩(wěn)定”下來,。如果這些振蕩的頻率與電動機(jī)的固有頻率相匹配,則會發(fā)生共振,,從而導(dǎo)致聽得見的噪聲,,振動,并在極端情況下導(dǎo)致失步或失速,。
-
-
2021-04-23 電機(jī)為什么會振動?
先分清是磁振動還是機(jī)械振動,如果電機(jī)在啟動時有振動,迅速切斷電源,在還沒有停止轉(zhuǎn)動時,振動繼續(xù)則是機(jī)械振動,振動停止則為電氣的磁振動. 機(jī)械震動檢查軸承和安裝的水平度以及連接的牢固性.磁振動則多是由于電機(jī)的定子繞組或是硅鋼片的問題.
-

-
2021-04-21 IP65和IP66哪個防水等級高
-

-
2021-04-19 伺服電機(jī)和步進(jìn)電機(jī)的區(qū)別
控制精度不同,;步進(jìn)電機(jī)的相數(shù)和拍數(shù)越多,,它的精確度就越高,,伺服電機(jī)取塊于自帶的編碼器,編碼器的刻度越多,,精度就越高,。
-
-
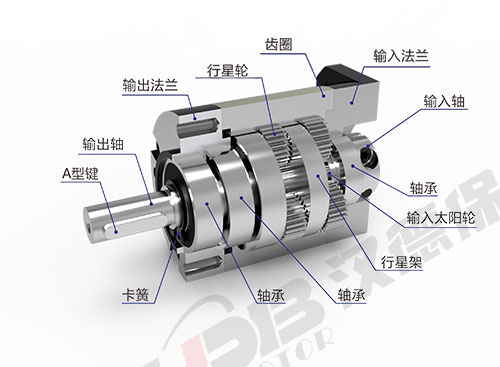
2021-04-16 行星減速機(jī)在步進(jìn),、伺服控制中的常見作用
我公司生產(chǎn)的行星減速機(jī)主要用在配置步進(jìn)電機(jī)和伺服電機(jī)控制系統(tǒng)上面,其功能簡單的說就是降低轉(zhuǎn)速,,增大扭矩,。下面來說說行星減速機(jī)在伺服控制中的常見應(yīng)用和它的主要功能。
-
-
2021-04-09 步進(jìn)電機(jī)驅(qū)動器整步,,半步和細(xì)分是什么和有什么區(qū)別
細(xì)分驅(qū)動在低速運(yùn)行時效果越好,如果輸入頻率太快,,對細(xì)分波形來說,,由于不能得到希望的電流波形,會使電機(jī)跟蹤精度變差,。 理論上細(xì)分?jǐn)?shù)越多,,降低振動的效果越明顯,但實(shí)際到8細(xì)分是效果變化并不大,。通過實(shí)際測試不同細(xì)分?jǐn)?shù)的電流波形和電機(jī)轉(zhuǎn)動角,,我們發(fā)現(xiàn)8細(xì)分與16細(xì)分以上不會有效果的差別。細(xì)分的角度雖然能定位,,但其精度不高,,因此定位控制時,用細(xì)分的2相或1相導(dǎo)通方式來定位,。

